
Back to Курс
Уровень 2. Продвинутые автономные роботы.
0% Complete
0/0 Steps
-
ОСНОВЫ РОБОТОТЕХНИКИУрок 1: Введение в робототехнику3 Темы
-
Урок 2: Знакомимся с датчиками4 Темы|1 Тест
-
Урок 3: Знакомимся с приводами6 Темы|1 Тест
-
Урок 4: Распознавание лиц с помощью робота2 Темы
-
АВТОНОМНЫЕ РОБОТЫУрок 5: Робот, избегающий препятствий4 Темы|1 Тест
-
Урок 6: Робот, распознающий край и границы5 Темы|1 Тест
-
Урок 7: Управляемый робот5 Темы|1 Тест
-
РЕАЛЬНОЕ ПРИМЕНЕНИЕ ИИ & РОБОТОТЕХНИКАУрок 8: Полноприводный робот3 Темы
-
Урок 9: Робот, отслеживающий положение объекта5 Темы|1 Тест
-
Урок 10: Подъёмно-транспортный робот - сборка2 Темы
-
Урок 11: Подъёмно-транспортный робот3 Темы
-
ИТОГОВЫЙ ПРОЕКТУрок 12: Курсовой проект
Урок 8, Тема 1
В прогрессе
Полноприводный робот – Сборка
Урок Progress
0% Complete
Сборка робота

Перед тем как мы перейдём к следующему заданию, давайте сначала посмотрим, как собрать вертикального робота с рулевым управлением.
Начнём с горизонтального робота.

- Прежде всего, отсоединим Поворотное колесо от робота Кварки, сняв болт.

- Поместим двигатели на пластину B1 с помощью крепёжной рамы для двигателя. Зафиксируем соединение при помощи болта M2 и гайки M2, которые есть в комплекте двигателей.
 Примечание: Нужно убедиться, что двигатель правильно закреплён.
Примечание: Нужно убедиться, что двигатель правильно закреплён.
 Примечание: На противоположной стороне двигателя должна быть надпись В1.
Примечание: На противоположной стороне двигателя должна быть надпись В1.

- Теперь присоединим колёса к двигателям.

- После этого, прикрепим вспомогательную конструкцию для колёс (с колёсами) спереди робота. Закрепим её при помощи гаек M2.5 и болтов М2.5.

- Для того, чтобы поместить телефон на робота, установим два звена A3 на робота и аккуратно нажмём на них до щелчка .
- Зафиксируем звенья A3 при помощи звена A4.

Сборка механической конструкции робота завершена.
Подключение двигателя колёс
Подключение двигателя такое же, как и у робота с рулевым управлением.
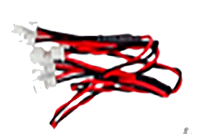
Подключим два левых двигателя, а затем соединим провод с платой. Правые двигатели подключаются точно так же.

Соединения показаны на рисунке.
Наш робот готов!