Вернуться в Курс
Уровень 2. Продвинутые автономные роботы.
0% завершено
0/0 Шагов
-
ОСНОВЫ РОБОТОТЕХНИКИУрок 1: Введение в робототехнику3 Темы
-
Урок 2: Знакомимся с датчиками4 Темы|1 Тест
-
Урок 3: Знакомимся с приводами6 Темы|1 Тест
-
Урок 4: Распознавание лиц с помощью робота2 Темы
-
АВТОНОМНЫЕ РОБОТЫУрок 5: Робот, избегающий препятствий4 Темы|1 Тест
-
Урок 6: Робот, распознающий край и границы5 Темы|1 Тест
-
Урок 7: Управляемый робот5 Темы|1 Тест
-
РЕАЛЬНОЕ ПРИМЕНЕНИЕ ИИ & РОБОТОТЕХНИКАУрок 8: Полноприводный робот3 Темы
-
Урок 9: Робот, отслеживающий положение объекта5 Темы|1 Тест
-
Урок 10: Подъёмно-транспортный робот - сборка2 Темы
-
Урок 11: Подъёмно-транспортный робот3 Темы
-
ИТОГОВЫЙ ПРОЕКТУрок 12: Курсовой проект
Урок 11, Тема 2
В прогрессе
Задание 2: Робот с ручным управлением
Урок прогресс
0% завершено
На последнем уроке мы написали программу для управления механизмом захвата у робота – для действий Pick (Поднять) и Place (Перенести).

В этом уроке мы создадим программу для того, чтобы робот двигался, и управлением его действиями.
Напишем код!
Мы начнём с файла предыдущего урока. Осталось только одно – создать управление роботом, чтобы он двигался вперёд, назад, влево и вправо. Мы уже это делали раньше.
Нажмём на спрайт Tobi и создадим такую же программу.
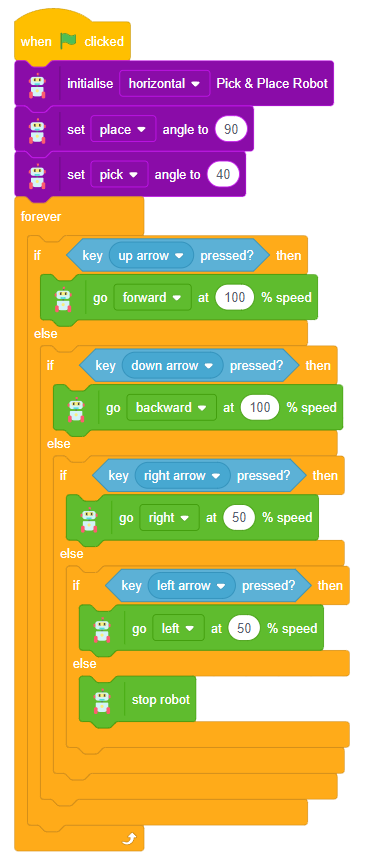
Поиграем с роботом
Теперь код завершён! Ты можешь проверить код и поиграть с роботом.