
Вернуться в Курс
Уровень 2. Продвинутые автономные роботы.
0% завершено
0/0 Шагов
-
ОСНОВЫ РОБОТОТЕХНИКИУрок 1: Введение в робототехнику3 Темы
-
Урок 2: Знакомимся с датчиками4 Темы|1 Тест
-
Урок 3: Знакомимся с приводами6 Темы|1 Тест
-
Урок 4: Распознавание лиц с помощью робота2 Темы
-
АВТОНОМНЫЕ РОБОТЫУрок 5: Робот, избегающий препятствий4 Темы|1 Тест
-
Урок 6: Робот, распознающий край и границы5 Темы|1 Тест
-
Урок 7: Управляемый робот5 Темы|1 Тест
-
РЕАЛЬНОЕ ПРИМЕНЕНИЕ ИИ & РОБОТОТЕХНИКАУрок 8: Полноприводный робот3 Темы
-
Урок 9: Робот, отслеживающий положение объекта5 Темы|1 Тест
-
Урок 10: Подъёмно-транспортный робот - сборка2 Темы
-
Урок 11: Подъёмно-транспортный робот3 Темы
-
ИТОГОВЫЙ ПРОЕКТУрок 12: Курсовой проект
Урок 11, Тема 1
В прогрессе
Задание 1: Подъём и перенос предмета
Урок прогресс
0% завершено
Настало время программировать своего собственного подъёмно-транспортного робота!

Робот должен передвигаться в четырёх направлениях: вперёд, назад, налево и направо, при нажатии на клавиши со стрелочками. Он также должен уметь поднимать и переносить предмет при помощи спрайтов со стрелками вверх и вниз. Давай теперь посмотрим как составить для них программу.
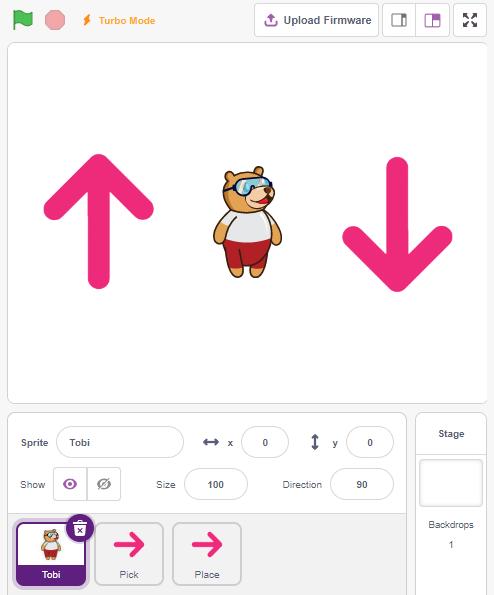
Настройка рабочей области
- Добавим два спрайта Arrow (Стрелка) на рабочую панель из библиотеки спрайтов.

- Изменим названия спрайтов Arrow (Стрелка) на Pick (Поднять) и Place (Перенести).
- Нажмём на спрайт Pick (Поднять) и добавим команду go to -150, 0 positions (переместиться в положение 150, 0) на 0 градусов и выберем размер 250%.

- Нажмём на спрайт Place (Перенести) и добавим строку go to 150, 0 positions (переместиться в положение 150, 0) на 180 градусов и выберем размер 250%.

- Наконец, нажмём на зелёный флажок, чтобы настроить рабочую область.
Установка исходного положения робота
- Добавим расширение Quarky Ultimate (Кварки алтимейт).
 Расширение добавляет вот такие блоки для подъёмно-транспортного робота.
Расширение добавляет вот такие блоки для подъёмно-транспортного робота.

- Выберем спрайт Tobi. Добавим блок when green flag clicked (когда нажат флажок).
- Добавим блок initialize () Pick and Place Robot (установить исходное положение_подъёмно-транспортного робота) из панели Quarky Ultimate Kit (Инструменты Кварки алтимейт). Выберем положение horizontal (горизонтальный).
- Добавим блок set () angle to () (установить_угол в_). Выберем действие place (перенести) и angle (угол) 90.
- Добавим ещё один блок set () angle to () (установить_угол в_). Выберем действие pick (поднять) и angle (угол) 40.

Действие Pick (поднять)
- Нажмём на спрайт Pick (Поднять) и добавим блок when the sprite is clicked (когда нажат спрайт) из панели Control (Управление). Таким образом мы запустим программу, когда нажмём на стрелку Pick (Поднять).
- Добавим блок pick (поднять) из панели Quarky Ultimate Kit (Инструменты Кварки алтимейт).

Проверим работу этого действия.

Действие Place (перенести)
- Нажмём на спрайт Place (Перенести) и добавим блок when the sprite is clicked (когда нажат спрайт) из панели Control (Управление). Таким образом мы запустим программу, когда нажмём на стрелку Place (Перенести).
- Добавим блок place (перенести) из панели Quarky Ultimate Kit (Инструменты Кварки алтимейт).

Проверим работу этого действия.
