
Back to Курс
Уровень 2. Продвинутые автономные роботы.
0% Complete
0/0 Steps
-
ОСНОВЫ РОБОТОТЕХНИКИУрок 1: Введение в робототехнику3 Темы
-
Урок 2: Знакомимся с датчиками4 Темы|1 Тест
-
Урок 3: Знакомимся с приводами6 Темы|1 Тест
-
Урок 4: Распознавание лиц с помощью робота2 Темы
-
АВТОНОМНЫЕ РОБОТЫУрок 5: Робот, избегающий препятствий4 Темы|1 Тест
-
Урок 6: Робот, распознающий край и границы5 Темы|1 Тест
-
Урок 7: Управляемый робот5 Темы|1 Тест
-
РЕАЛЬНОЕ ПРИМЕНЕНИЕ ИИ & РОБОТОТЕХНИКАУрок 8: Полноприводный робот3 Темы
-
Урок 9: Робот, отслеживающий положение объекта5 Темы|1 Тест
-
Урок 10: Подъёмно-транспортный робот - сборка2 Темы
-
Урок 11: Подъёмно-транспортный робот3 Темы
-
ИТОГОВЫЙ ПРОЕКТУрок 12: Курсовой проект
Урок 3, Тема 5
В прогрессе
Задание 3: Поворотное движение сервопривода
Урок Progress
0% Complete
Задача 3: Поворотное движение сервопривода
Для решения этой задачи нам понадобится сделать так, чтобы стержень сервопривода постоянно поворачивался, меняя угол на 10 градусов, в обоих направлениях.

Приступим!
- Перейдем на панель и перетащим блок when green flag clicked в область программирования.
- Затем перейдём на панель Variables (Переменные) и создадим переменную под названием Angle (Угол).
- После этого установим блок set () to (). Из выпадающего списка выберем переменную Angle (Угол) и установим ее значение на 0. Таким образом мы определили начальное положение сервопривода как положение под углом 0 градусов.

- Теперь перетащим блок forever из панели Control (Управление).
- Мы хотим повторить эти шаги, поэтому поместим блок repeat () из панели Events (События) внутрь блока forever. Установим его значение на 18.

- После этого, чтобы иметь возможность менять угол стержня, поместим блок change () by () из панели Variables (Переменные) внутрь блока repeat ().
- Из выпадающего списка выберем переменную Angle (Угол) и установим ее значение на 10, чтобы угол изменился на 10 градусов.
- Теперь добавим блок set servo on () to () angle. атем поместим внутрь этого блока переменную Angle (Угол).
- После этого добавим задержку на 0,1 секунды для того, чтобы угол менялся стабильно, поместив блок wait чуть ниже.
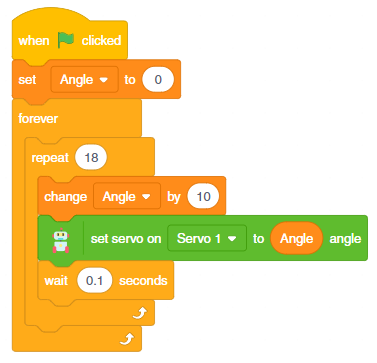
- И наконец — скопируем весь этот блок repeat и вставим его ниже. Изменим значение переменной Angle (Угол) в блоке change () by () на -10. Этот блок repeat позволит стержню вращаться в противоположном направлении.

Теперь мы можем запустить нашу программу!
Проверка
Как вы можете видеть, стержень сервопривод вращается в обоих направлениях попеременно с изменением угла на 10 градусов.