
Уровень 1. Роботы и Искусственный интеллект с Кварки
-
НАЧАЛОУрок 1: Здравствуй, робот Кварки!5 Темы|1 Тест
-
РОБОТЫУрок 2: Игры с роботами3 Темы|1 Тест
-
Урок 3: Робот с беспроводным управлением3 Темы
-
Урок 4: Датчики отслеживания маршрута2 Темы
-
Урок 5: Робот, который двигается по линии3 Темы|1 Тест
-
ПЕРЕНОС ОБУЧЕНИЯ В РЕАЛЬНЫЙ МИРУрок 6: Кварки как робот-курьер с искусственным интеллектом - Часть 13 Темы
-
Урок 7: Кварки как робот-курьер с искусственным интеллектом - Часть 24 Темы
-
Урок 8: Создаём собственного робота сборщика мусора - Часть 12 Темы
-
Урок 9: Создаём собственного робота сборщика мусора - Часть 23 Темы|1 Тест
-
Урок 10: Создаём свой собственный беспилотный автомобиль5 Темы|1 Тест
-
Урок 11: Робот-питомец4 Темы
-
ЗАВЕРШАЮЩИЙ ПРОЕКТУрок 12: Итоговый проект
Задание 2: Упрощённый робот, следующий по маршруту
Упрощённый робот, следующий по маршруту – Общие сведения
Ты согласишься, если мы скажем, что написание программы для робота, следующего по маршруту, было довольно утомительным; мы добавляли так много блоков, постоянно проверяли каждый двигатель в отдельности и чего только ещё не делали.
Но у нас есть и хорошие новости! В PictoBlox есть особые блоки для робота, следующего по маршруту, которые заменят ВСЕ блоки, используемые нами в предыдущей программе. Давайте посмотрим на них!
Напишем код!
- Добавим блок green flag (зелёный флажок) в поле написания скриптов и два блока set () IR sensor threshold to () (задать_пороговое значение _ ИК датчика_) и зададим пороговые значения для левого и правого ИК датчиков.

- Перейдём на панель Robot (Робот) и перетащим блок set parameter F (), T1 (), T2 () (задать параметр F_, T1_, T2_). Выберем параметры, значения которых мы определили в предыдущей теме.

- Добавим блок forever (всегда) ниже блока set parameter F (), T1 (), T2 () (задать параметр F_, T1_, T2_).
- Теперь из панели Robot (Робот) вставим блок do line following (следовать по маршруту) внутрь блока forever (всегда). Этот блок позаботится обо ВСЕХ условиях следования по маршруту, которые мы проверяли по отдельности в нашей предыдущей программе.

- Затем добавим блок stop robot (остановить робота) внутрь блока do line following (следовать по маршруту).

Теперь ты по-настоящему можешь насладиться результатом!

Что происходит в контрольных точках?
Как мы уже заметили, робот распознаёт контрольные точки в блоке следования по маршруту. В этих контрольных точках робот может выполнить любое действие, какое мы захотим. Как и в предыдущем коде, мы заставим робота остановиться в контрольной точке.
Мы можем заставить робота просто двигаться вперёд, а не только непрерывно по маршруту (по маршруту с остановками), вот так:
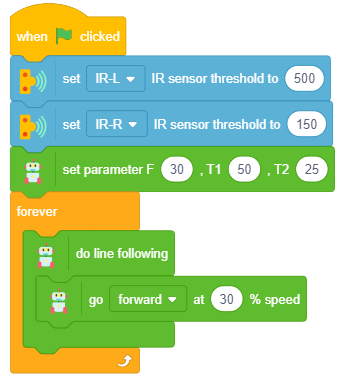

На следующих уроках мы будем использовать эти контрольные точки многими разными способами!